USBL & LBL Survei Hidrografi
Survei Hidrografi
1. USBL OVERVIEW AND APPLICATION
USBL (Ultra Shot Baseline) atau garis dasar ultra pendek. Sistem USBL adalah sistem penentuan posisi akustik yang digunakan untuk bawah air seperti mengukur jarak dan ketinggian ke target. Pelacakannnya menggunakan transceiver multi elemen yang disebut HPT( High Performen Transceiver).
USBL ini untuk melacak objek bawah laut ROV. Presisi tergantung pada kedalaman air, semakin lama/ jauh device objek yang dilacak dari kapal maka kesalahan semakin banyak.
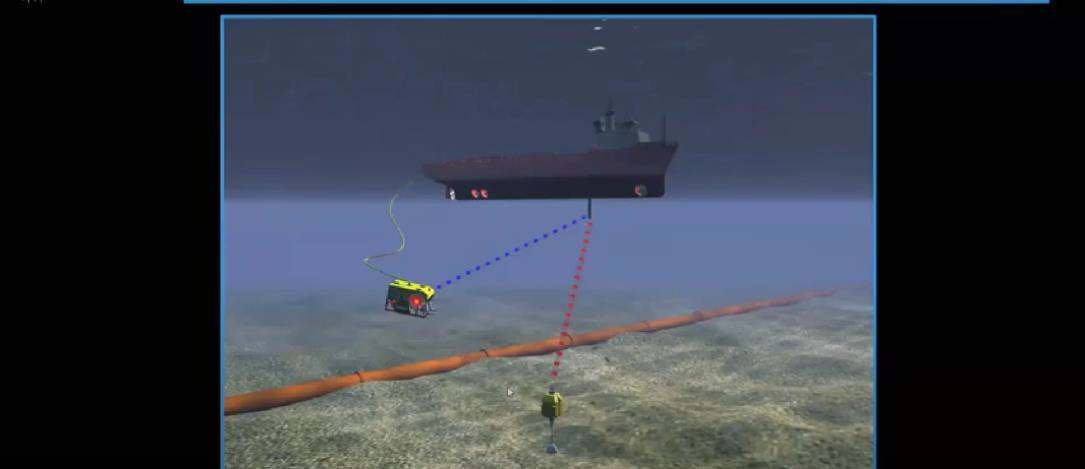
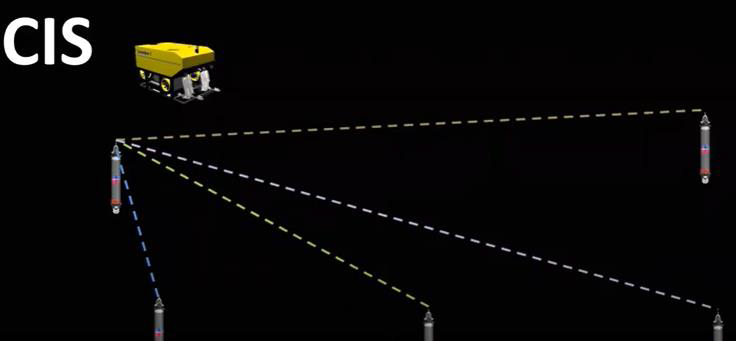
Berikut kendaraan yang dioperasikan dari jarak jauh yang akan dilacak menggunakan system USBL yang diberi posisi di jalur air.

Sistem USBL digunakan untuk mendapatkan informasi lebih lanjut tentang ROV yang lebih kecil sehingga untuk operasi perairan dangkal dapat memantau lubang atau beberapa pekerjaan di dasar laut dan dapat mengetahui posisi semua penyelam jika terjadi keadaan darurat.
USBL akan berada dalam posisi dinamis (L-USBL) merupakan kombinasi dari susunan garis dasar yang panjang di dasar laut dan kemudian system USBL di permukaan bisa berupa rig atau FPSO atau kapal bor yang akan diposisikan secara dinamis dengan menggunakan referensi dasar laut sebagai referensi untuk memberikan posisi di permukaan.
Berikut transceiver yang digunakan pada USBL.

Ranger 2 adalah jenis lengkap transceiver dengan kapal yang lebih besar. Mini ranger untuk kapal yang lebih kecil dengan air dangkal sekitar 1 meter dan kemudian Micro Ranger untuk melepaskan barang-barang air dangkal di perairan pantai tetapi juga menggunakan beberapa aplikasi atau istilahnya otonom.

L-USBL adalah perangkat lunak yang serupa dengan beberapa fitur tambahan yang memberikan sertifikasi untuk digunakan penentuan posisi dinamis untuk kapal yang lebih besar.
Aplikasi lain adalah iUSBL yaitu meletakkan transceiver pada AUV (Autonomous underwater vehicles) dan transponder pada targetnya.

Pada kapal kita membutuhkan transceiver/ kepala sonar itu sendiri. Transceiver berkinerja tinggi yang dipasang di bagian depan kapal yang menciptakan kebisingan dan mengukur dimana objek berada melalui gelombang suara. Kita juga membutuhkan suar atau transponder pada objek yang kita lacak. Keduanya bagian penting dari USBL yang kemudian terespond di atas.
HPT 5000 merupakan elemen pemancar membuat pengiriman sinyal akustik dan akan dikodekan dalam gelombang suara. Kami memiliki hidrofon untuk menerima elemen dari luar yang terespond dari transponder. Transceiver ini memiliki lima elemen penerima dan ada yang HPT 7000 dengan tujuh elemen dan kemudian Ranger 2 atau disebut HPT 3000 dengan lima elemen bukan tiga elemen, tranceiver ini digunakan untuk pelacakan ketinggian sehingga cukup dengan 90 derajat.
2. PRINCIPLES OF USBL OPERATION
Bagaimana kita mendapatkan posisi penyelam?
Ada tiga informasi yang perlu kita ketahui untuk mendapatkan posisi yaitu
- Jarak dari kapal
- Bantalan dari kapal, relative dengan kapal untuk mengetahui arahnya
- Sudut elevasi/ kedalaman
a. Jarak dari kapal , dimulai dari jarak miring untuk mengukur seberapa jauh jaraknya. Ini adalah jenis pengukuran waktu yang sederhana. Jadi, kami mengirim interogasi ke dalam air dari transceiver dan transponder atau beacon akan merespon dengan system mengukur berapa lama proses tersebut, jadi kita tahu jarak yang sama dari waktu ke waktu dengan jarak sama dengan kecepatan dikalikan waktu.

Dalam proses ini contoh 1500 meter per detik yaitu kecepatan suara lalu kita kirim interogasi dan mendapat respond dua detik kemudian, berapa jauh jaraknya?
Jawab : waktu perjalanan = 2s, Kecepatan suara = 1500m/s
Waktu yang dibutuhkan dalam menunggu respond kembali contoh 200 milidetik setelah itu kemudian mengirimkan respond langsung ke transceiver sehingga waktu tempuh sekarang menjadi 2,2 detik. Jadi terdapat penundaan 200 detik pada suar.
- Penundaaan waktu penyelesaian dikalikan dengan kecepatan suara dibagi dua untuk memberi kita rentang kemiringan
- Jadi, jauh jaraknya yaitu (200s X 1500m/s)/2 = 150.000 m
b. Bantalan dari kapal , sejumlah hidrofon dipasang di USBL, gelombang suara yang melintasi permukaan transceiver dapat mengukur waktu kedatangan sinyal itu di masing-masing elemen dengan ditandai elemen tersebut berkedip. Selisih waktu digunakan untuk menghitung sudut proporsional dari tanda Maju(Ship’s Head)

c. Sudut Elevasi/ ketinggian, jika sinyal datang dari bawah akan mengaktifkan semua yang mereka terima yang diperoleh. Elemen dan waktu yang hampir bersamaan dengan titik yang tetap. Ketika datang dari sudut akan mengaktifkan pada waktu yang berbeda tetapi juga pada titik yang berbeda dalam fase sinyal juga.

3. TRACKING METHOD
Bagaimana kita mengukur berbagai bagian untuk melacak objek?
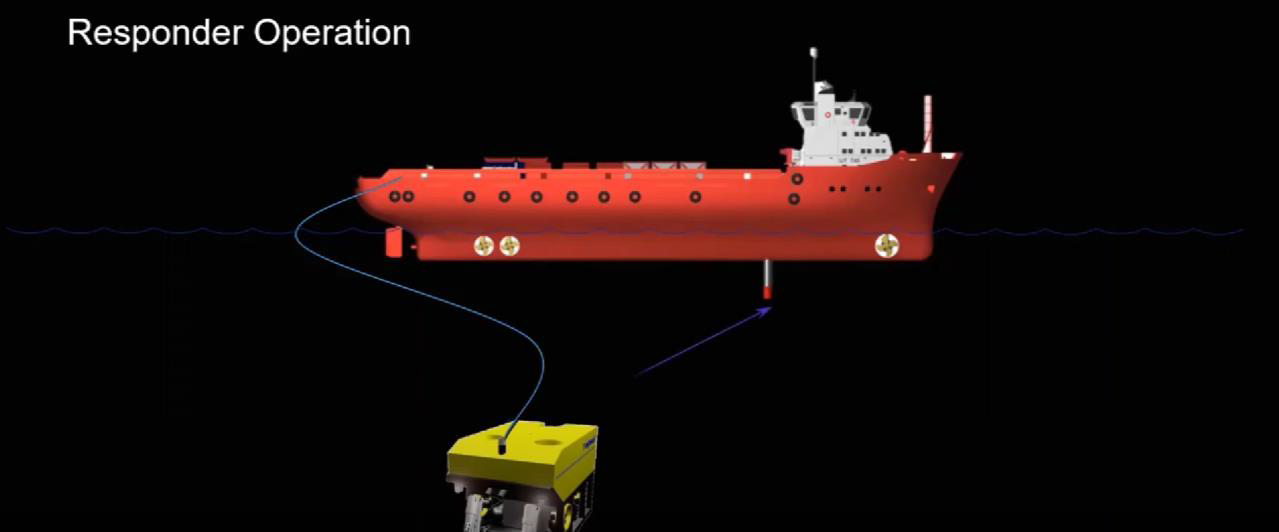
- Responder Operation
Dimulai dengan versi operasi responder yang relative sederhana ini adalah pelacakan ROV /kendaraan lain. Jika memiliki tether dan kabel yang terhubung ke ROV, transceiver atau transponder di ROV dimasukkan ke dalam kabel itu sehingga kabel akan keluar dari PC ke multiplexer ke bawah melalui kabel serat optic ke kendaraan sehingga menjadi demultiplexer. Yang terjadi disini yaitu kami mengirim interogasi ke kabel secara akustik masih ada semacam versi waktu penyelesaian / menunggu transmit setelah penundaan kemudian mengirimkan respond akustik kembali ke air untuk transceiver mengukur di dalam air.
- Transponder Operation (Individual Interrogate)
Operasi transponder ini kami akan mengirimkan interogasi individu ke objek yang ingin kami lacak dan itu harus merespond kembali. Komunikator yang terjadi adalah sinyal interogasi individu masuk ke dalam air dan pada dasarnya menggunkaan beacon untuk mengatasinya. Interogasi individu khusus untuk satu suar dengan merespond sinyal respond umum (CRS) pada dasarnya akan mengatakan alamatnya dengan sendiri itulah yang terjadi pada individu interogasi sehingga melacak hal-hal secara individual atau interogasi tunggal sangat efektif.

- Transponder Operation (Common interrogate)
Semua suar bawah laut di program untuk mendengarkan saluran interogasi umum dengan baik. Semua orang di saluran ini merespond ketika mendengar interogasi ini sehingga kami akan mengirimkan interogasi ke dalam air dan meraka semua akan merespond secara individual. Inilah mengapa waktu penyelesaian itu cukup penting karena kita dapat memprogram dengan cepat bahkan ketika di atas air kita dapat memberi tahu suar waktu penyelesaian mereka sehingga harus menjadi program/terdata sebelum mereka masuk ke dalam air. Tingkat pembaruan secara historis terbatas pada waktu perjalanan akustik. “Ping Stacking memungkinkan pembaruan yang lebih cepat. Diterapkan secara otomatis dalam mode LIS dan CIS

- Telemetry Tracking( AUV Operation)
Metode pelacakan yang sangat cepat yaitu AUV. Interogasi yang kami kirimkan AV berisi posisi yang diberi cap waktu data dari perhitungan sebelumnya, jika interogasi sebelumnya kita mendapat posisi tetap untuk AUV sehingga informasi dan waktu memungkinkan AUV berjalan dengan baik.
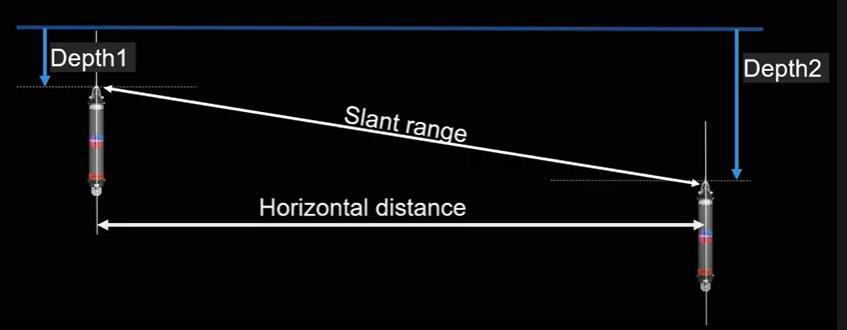
- Layback Tracking ( Depth Aiding)
Metode pelacakan kebelakang karena lapisan suhu yang berbeda di bawah laut yang masing-masing mempengaruhi kecepatan suara. Jadi, kita mengukur rentang kemiringan dengan akustik dan mengukur kedalaman dengan sensor kedalaman sehingga kita dapat posisi offset lateralnya.
4. CASIUS
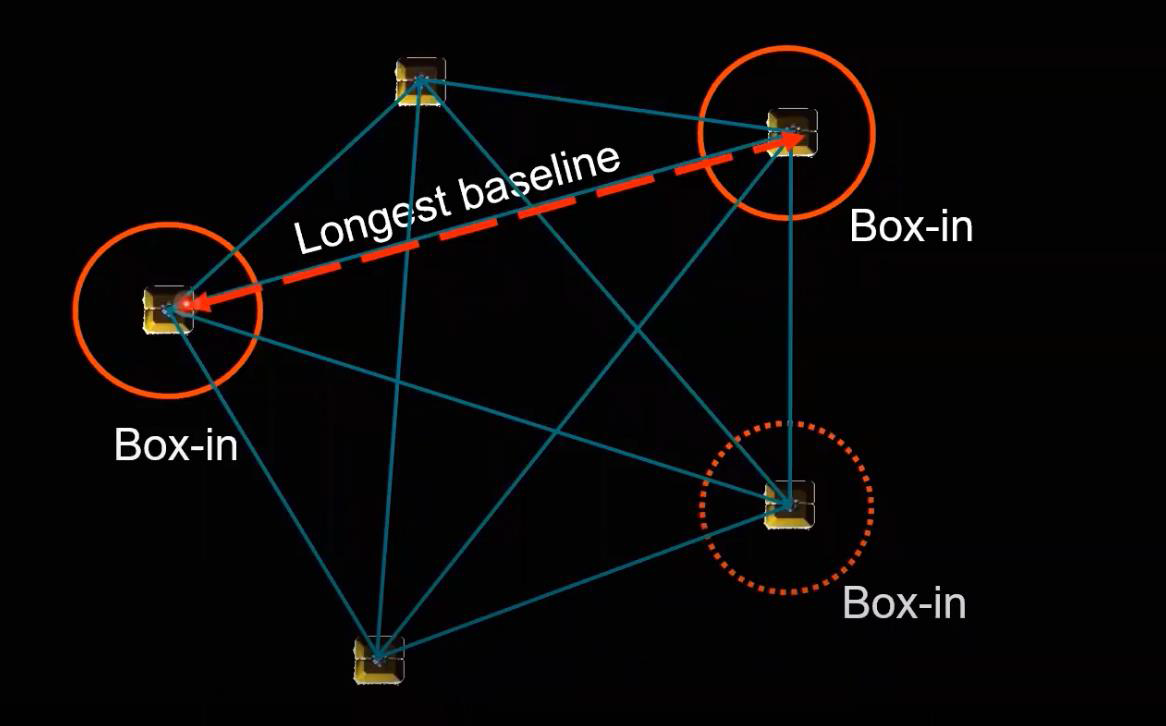
Transceiver yang dipasang di kapal dengan sistem GNSS/GPS dipasang di kapal juga untuk memberikan referensi global bagi kami untuk referensi dunia. Kapal bergerak sepanjang waktu jadi kami perlu memiliki MOU pada unit referensi atau unit referensi pos yang dipasang di kapal untuk memberi tahu ke sistem bahwa benda yang dilampirkan bergerak. Pada saat transceiver sebelumnya sudah dikalibrasi, kita perlu memasukkannya ke dalam kapal dan meletakan dengan kaitannya dan kami menginstal ke dalam sistem pengukura offset untuk berbagai bit. Ini relatif terhadap CRP. Untuk kalibrasi tersebut menggunakan perangkat lunak CASIUS (Calibration of Attitude Sensors In a USBL System). Kami menempatkan suar transponder di dasar laut dan kemudian melakukan manuver di atas. Hal pertama yang dilakukan Casius adalah melakukan apa yang disebut kotak masuk untuk memberikan kotak ini dalam posisi global di dasar laut. Sekarang referensi tetap kita dapat mengkalibrasi sisa sistem kita dan kemudian manuver sebelumnya akan memberikan sejumlah perbaikan posisi untuk suar pada permukaan di dasar laut. Perbedaan posisi kapal pada dasarnya hanya menunjukkan bahwa ada kesalahan dalam offset.
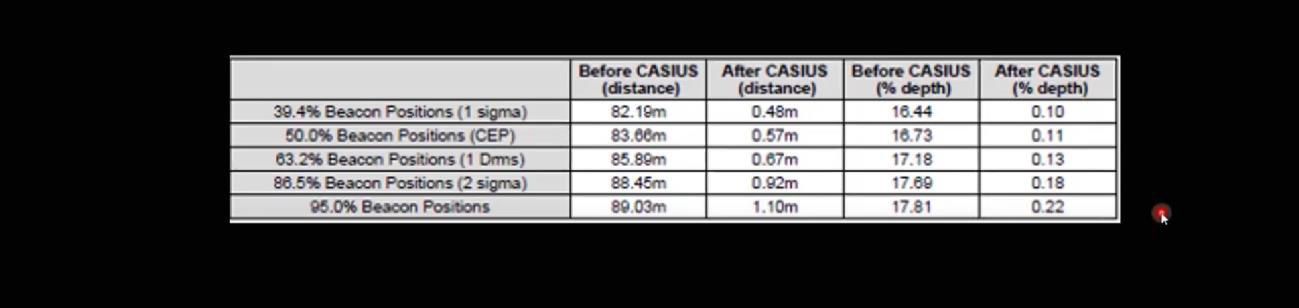
Koreksi Casius ini memberikan presentase presisi kedalaman air jadi dalam. Jika pada After Casius 0.13 kedalam air presisi yang berarti dalam seribu meter air setelah dikalibrasi memberi kita tidak lebih dari 0.13 m kesalahan pada dasar laut.
1. Principles of LBL
LBL (long baseline) yang menggunakan transponder untuk menentukan kerangka dasar laut. Transponder ini ditempatkan di dasar laut dan posisinya diletakkan sesuai dengan grid dari transponder yang berjarak 100-1000m. Pada prinsipnya transponder dasar laut memiliki referensi tetap dan array LBL mengelilingi area operasi dan hanya bergantung pada geometri dalam LBO akustik. Cara kerjanya sebenarnya mirip dengan GPS dengan penentuan lokasi menggunakan trilaterasi dan pengukuran waktu. Karena itu, konsep trilaterasi ini menghitung seberapa jauh dengan menggunakan pengukuran waktu, sehingga dapat dihitung jarak dengan memanfaatkan sistem rentang jangkauan. Dalam LBL tidak tergantung kepada kedalaman sehingga jika transponder diletakkan pada kedalaman yang berbeda kita masih bisa mendapatkan kinerja yang sama persis. Oleh karena itu, LBL dapat dikatakan memiliki tingkat presisi yang tinggi. Wideband akustik yang dimiliki LBL juga memiliki peningkatan antara 2 dengan 3 dimana wideband 3 protocols lebih efisien dan lebih cepat dari sebelumnya. Cara penyebaran LBL dengan menggunakan software 6+ sonardyne wideband dan hardware nya adalah:
- Transceiver ROV Navigator. Adanya elemen transduser pada ram hidrolik untuk mengangkat kerangka ROV sehingga akan membuat komunikasi menjadi lebih baik. Gambar dibawah adalah remote transducer dengan panjang cable standard adalah 4 m dan maksimal yaitu 5m. transceiver menggunakan kalibrasi instalasi

- Transponders memberikan posisi dengan sistem LBL yang dasarnya terkait pada COMPATT yang berarti computing and telementary transponders dengan gambaran 6G+ wideband dan teknologi digital. Transponders dapat memberikan penentuan posisi seperti adanya GPS. COMPATT dimaksudkan untuk meletakkan struktur atau objek lain yang ingin dilacak di bawah laut atau untuk mendapatkan posisi dengan jenis sistem inersia bawaan menggunakan data pitch roll dan heave heading yang mana secara otomatis akan langsung menyimpan data dengan sd card yang dapat dipulihkan secara akustik
- Rigid Stand adalah dudukan atau stand dengan dimensi yang compact dan memiliki baki di bagian bawah yang dapat diisi dengan semen. Dudukan atau tripod ini menjadi meungkinkan jika diletakkan di dasar laut. Keuntungan menggunakannya adalah dapat memposisikan offset bawah laut dan tidak mengubah gerak transponder. Stabilitas yang ada tidak akan memberikan pergerakan. Sedangkan kerugiannya adalah bisa saja alat ini jatuh di dasar laut yang tidak rata karena adanya arus sehingga menyebabkan masalah dalam penyebaran.

- Fast Markers dan Clump weights adalah dasar beton dengan tiang kait yang memiliki tambatan dan memiliki bagian yang compact sehingga menjadi pemberat laut dengan gaya dorong 20kg. Kelebihannya adalah pergerakkan yang dapat stabil dengan penandaan dari fast makers dan clump weight yang cepat. Dapat menggunakan jumlah ruak dek yang tidak terlalu besar sehingga tidak m]perlu menggunakan kapal yang terlalu besar. Sedangkan kekurangannya adalah bisa saja alat ini hanyut atau bergoyang karena arus sehingga dapat terjadi pelepasan atau mungkin kerusakan pada alat ini. Jadi, kerugiannya bisa menyebabkan tabrakan atau pemampatan.
Peletakkan bawah air akustik long baseline (LBL) melibatkan penggunaan rangkaian suar transponder yang terletak di dasar laut dan transduser akustik yang dapat dipasang ke kapal. Jarak antara beacon dalam jaringan yang dikalibrasi disebut sebagai garis dasar. Transduser yang juga dapat ditempatkan pada towfish, remotely dioperasikan vehicle (ROV) atau kendaraan bawah air otonom (AUV) mentransmisikan sinyal akustik, yang dideteksi oleh transponder. Transponder mengirimkan response, dan waktu antara transmisi sinyal pertama dan penerimaan sinyal kedua memungkinkan penghitungan jarak antara transduser dan transponder. Teknik dasar dengan transduser tambahan yang terletak di ROV terdiri dari kabel yang menghubungkan ROV dan kapal, yang melaluinya perintah daya dan kontrol diteruskan. Jumlah minimum suar dasar laut yang diperlukan untuk navigasi yang jelas adalah tiga. Namun, yang keempat akan memberikan tingkat redundansi dan pemeriksaan kualitas. Kalibrasi LBL dilakukan dengan syarat yaitu:
a. Posisi jatuh yang baik
b. Rentang dasar
c. Kedalaman
Adapun untuk perhitungan jangkauan dari pengamatan akustik dapat dihitung dengan :
Travel time = 2.2s
Less 200ms TAT = 2s
Slant range = 1500m
Turnaround time (TAT) = 200ms

Sehingga didapat persamaan LBL yaitu:
Slant Range = ((two way travel time – TAT)*Speed of sound) / 2
Sedangkan untuk kedalaman relatif dilakukan rentang penginderaan kedalaman yang berbeda yang umumnya seperti akurasi standar dengan metode mendefinisikan beacon dalam array LBO menggunakan ROV sehingga mereka akan terbang di sekitar ROV dengan angka kuarsa lebih tinggi. Sensor kedalaman dan secara fisik mengukur kedalaman setiap suar dalam array dan kemudian pasang surut sehingga memberikan survey deck gloop atau disebut kedalaman relatif yang dalam matematis dihitung dengan phytagoras.

LBL Calibration Process dilakukan dengan koordinat penurunan yang didapat juga dari perhitungan kedalaman data CIS dari rav pengirim sinyal IRS. Pemberian sinyal setelah semua suar diprogram dengan otomatis akan memberikan respons balasan dengan identitas ROV ke PC yang mana suar dalam array dan semua akan merespon pesan satu-satu. Semua pengukuran dasar ini ke segala arah tidak hanya sekali tetapi berkali-kali minimal 10 pengukuran di masing-masing secara real time.
*CIS (common interogation signal


Dari gambar diatas standar deviasi pertama adalah 68% dari data dan itu salah satu penanda yang digunakan untuk QC data melihat jenis kualitas data.
Dari pengamatan dan data yang didapatkan dapat dihitung perataan atau Least Squares Algorithm yang dikalkulasikan dengan orientasi dan geometry LBL array
LBL Position dengan konsep trilaterasi seperti diatas didefinisikan dengan cara kerja pada GPS dengan menguraikan waktu yang berbeda antara data waktu dengan rentang yang dipecah menjadi beberapa. Rentang yang dipecah menjadi beberapa akan diproses dan dapat melacak ROV yang dilakukannya dengan mengirim sinyal ke suara dengan contoh menggunakan gyro compact sehingga lebih banyak data heading.

LBL Metrology memposisikan struktur dasar laut sehingga kita perlu mengukurnya seberapa jauh menempatkannya dan dapat diukur perbedaan offset lateral dan offset xyz serta sudut dari semuanya dan hubungan data tersebut dalam diagram CAD.


Komentar
Posting Komentar